
Helicopter Stability
(Updated on 19th March 2021)

Stability
Stability can be simply classified as static stability or dynamic stability.
- Static Stability. If an object is disturbed from a given position and following this disturbance it tends to return to this position of its own accord, it is said to be statically stable. If, following the disturbance, it continues to move further and further away from its original position, it is said to be statically unstable; if it remains in the disturbed position, it is said to be statically neutrally stable.
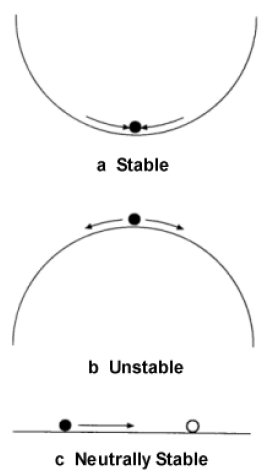
Static Stability
- Dynamic Stability. If an object is statically stable it will return to its original position, but in doing so, it may initially overshoot. If the amplitude of the oscillations decreases and dies out, it is said to be dynamically stable. If the amplitude of the oscillations increases, then it is said to be dynamically unstable, and if the oscillations continue, but at a constant amplitude, it is said to be dynamically neutrally stable.
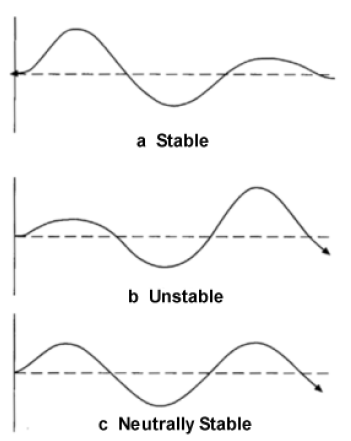
Dynamic Stability
Stability in the Hover
Consider a helicopter hovering in still air when a gust of wind affects the rotor disc from the side. The disc will flap away from the wind and, if no corrective action is taken by the pilot, the helicopter will move away from the gust. After a short while the gust of wind dies out but, because the helicopter is moving sideways, it will now experience an airflow coming from the opposite direction. The helicopter will now slow down as the disc begins to flap away from this new airflow; in addition, the fuselage will tend to follow through as an overswing, thereby tilting the disc further than it was tilted before, and the helicopter will move sideways back towards its original position faster than it originally moved away. The movement of the helicopter will
result in it experiencing continual sideways changes in the airflow affecting the disc and, although it will be statically stable, because the amplitude of the oscillations will be continually increasing, it will be dynamically unstable. The effect of a gust of wind from any direction will produce the same effect on the disc, therefore the helicopter is dynamically unstable in the pitching and rolling planes.
A gust of wind will also affect the tail rotor. If for example the helicopter has a starboard mounted rotor and is struck by a gust from the starboard side the tail rotor’s angle of attack will decrease. Assisted by the weathercock action of the fuselage, the helicopter will then yaw into the gust, ie to starboard. The aircraft will also move away from the gust and in so doing it will reduce the effect of the gust on the tail rotor. The aircraft will then experience an airflow from its own sideways movement and the aircraft will yaw to port. Following the movement of the helicopter it can be seen that the fuselage will be alternately yawing to port and starboard with each successive sideways movement of the helicopter. Therefore, when hovering, the helicopter is statically stable but dynamically unstable in the yawing plane.
Stability in Forward Flight
If a gust of wind from the starboard side strikes the fuselage of a helicopter with a starboard mounted tail rotor in forward flight, the immediate effect is for the tail rotor’s angle of attack to decrease and the helicopter to yaw to starboard. But the inertia of the helicopter will continue to keep it on its original flight path; weathercock action will then return the fuselage to its original position. In forward flight, therefore, the helicopter is both statically and dynamically stable in the yawing plane.
If a gust of wind affects the disc from ahead, the disc will flap back, and forward thrust will reduce and the aircraft will decelerate. Because the centre of gravity is below the thrust line, the inertia of the fuselage will cause the aircraft to pitch nose up, taking the disc back further and thus decreasing speed even more. When the speed has stabilised at a lower figure, the fuselage will start to pitch down below its original position (pendulosity): at the same time the disc will flap forward relative to the fuselage (reduced flap back due to lower speed). Now the speed will start to increase with the helicopter descending in a shallow dive and, as the speed increases, the disc will begin to flap back again and the cycle will be repeated, but with increasing amplitude. The helicopter will finally be pitching outside control limits unless cyclic correction is applied early in the cycle. The helicopter is, therefore, statically stable because each oscillation will take it through its original position, but is dynamically unstable because the amplitude of the oscillations progressively increases.
Stability Aids
Tail Stabiliser
One method of improving stability in forward flight is by fitting a stabiliser at the tail of the fuselage. Its purpose is to help prevent the fuselage from following through when a gust of wind causes the disc to flap back. As the fuselage begins to pitch up, the increasing angle of attack on the stabiliser will damp down the movement and the rearward tilt of the disc will be greatly reduced; the reverse effect takes place when the fuselage pitches down. It should be noted, however, that the stabiliser will produce adverse effects if the helicopter is moving backwards: following a gust of wind which causes the disc to flap forward, the fuselage will pitch nose down and the tail will pitch up; this will increase the lifting force on the stabiliser, thereby increasing the pitch-up movement of the tail to a dangerous degree.
The Autostabiliser
The autostabiliser, is the simplest form of control system. The autostabiliser is a damping device without the ability to hold a given datum, hence a helicopter autopilot often consists of an autostabiliser to which long term datum holding is added. There are two types of autopilot which may be fitted to helicopters:
-
- Basic Autopilot. A basic autopilot provides long term datum holding of one or more variables but does not permit the pilot to introduce demands through his controls. Trimmers may be used to make limited adjustments.
- Directed Autopilot. A directed autopilot provides long term datum holding of one or more variables and also permits the pilot to introduce demands through his controls. Such an autopilot is also described as an Attitude Manoeuvre Demand System and may also be called Automatic Stabilisation Equipment.
Summary
As you can see, helicopter stability is not a simple topic but in general, helicopters are statically stable and dynamically unstable.
The helicopter is statically stable because each oscillation will take it through its original position, but it is dynamically unstable because the amplitude of the oscillations progressively increases.
For really technical information you can try reading this: http://www.aerojockey.com/papers/helicopter/report.html
Did you enjoy this post? Why not leave a comment below and continue the conversation, or subscribe to my feed and get articles like this delivered automatically to your feed reader.







Comments
No comments yet.
Sorry, the comment form is closed at this time.